
Last time we spoke at length about the Sabertooth controller and mentioned it’s ability to record flight data. Here is a sample recording from a run of a big rover (specifically, the big robot pictured above):
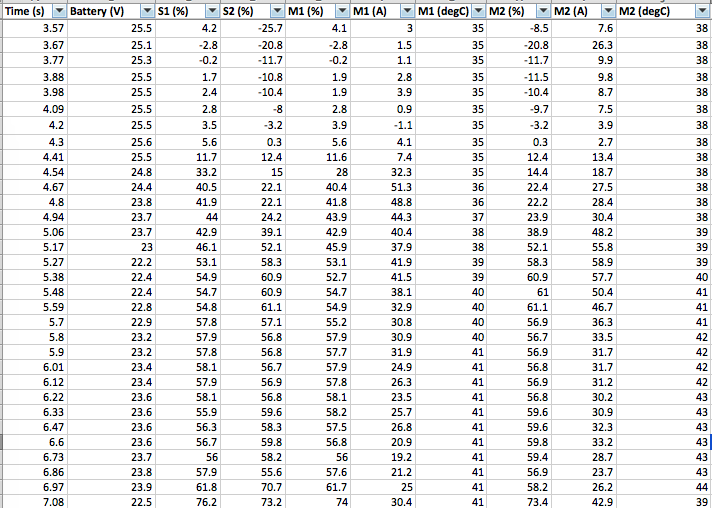
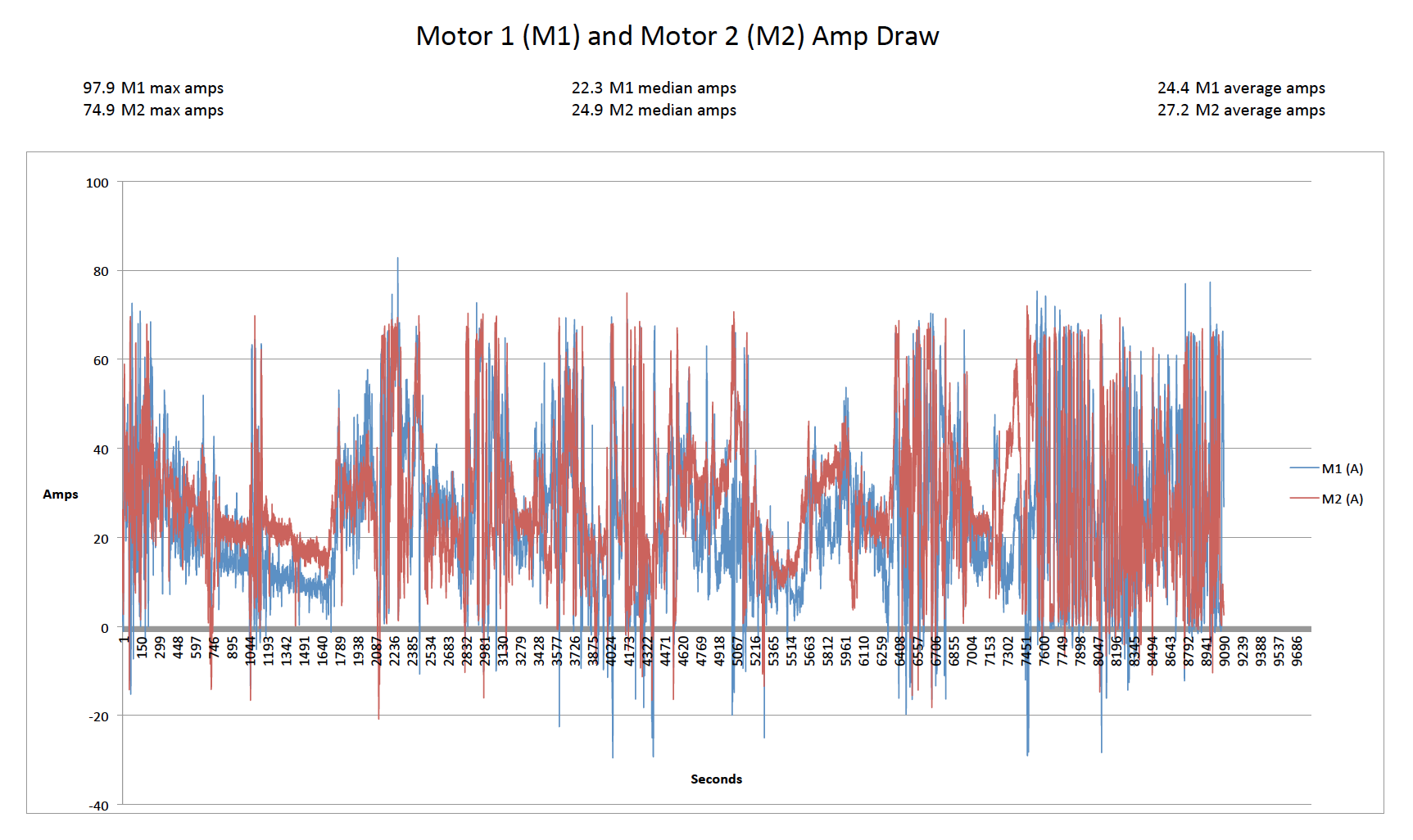
It turns out this data is quite useful. For instance, you can create a chart of the amp draw for both motors, i.e.:
Monitor Sabertooth Wirelessly with VirtualHere
Perhaps you think that amp draw chart is great, but how do you connect a computer to your rover’s Sabertooth when your rover is running a mission 200 meters away? I’ve had good luck with the help of a Raspberry Pi 3 with a little software app called VirtualHere1 that allows you to connect to USB devices over the internet.
Here are the steps to get going:
- Install the VirtualHere server on your Raspberry Pi
- Install the VirtualHere client on your PC
- Connect the Sabertooth to the Raspberry Pi via a USB cable
- Start VirtualHere server on Raspberry Pi via:
sudo /usr/sbin/vhusbdarm -b
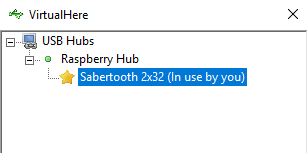
- Open the VirtualHere client on your PC. You should see the server (called “Raspberry Hub” in the image below) (you may have to specify the server’s IP if it doesn’t automatically populate). You should see a list of USB devices connected to your Raspberry Pi — notice below that Sabertooth 2×32 is the only device connected to the Raspberry Pi. So we click on the Sabertooth 2×32 and select “Use”.
VirtualHere Windows client screen - Next open up DEScribe, click “Connect and Download Settings” and you should see an option for “Serial Port” like “COM3”:
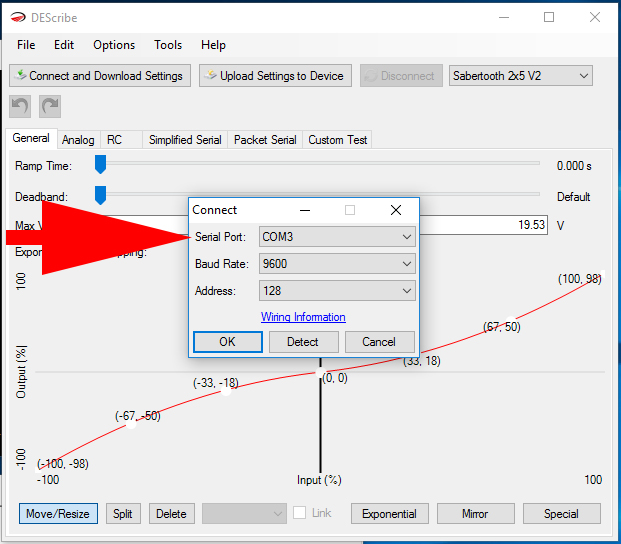
DESCribe connect screen — note that COM3 is the virtual Sabertooth device on my machine - Now click “OK” and DEScribe should connect to the Sabertooth. Voila! You’re wirelessly connected to a remote Sabertooth controller!
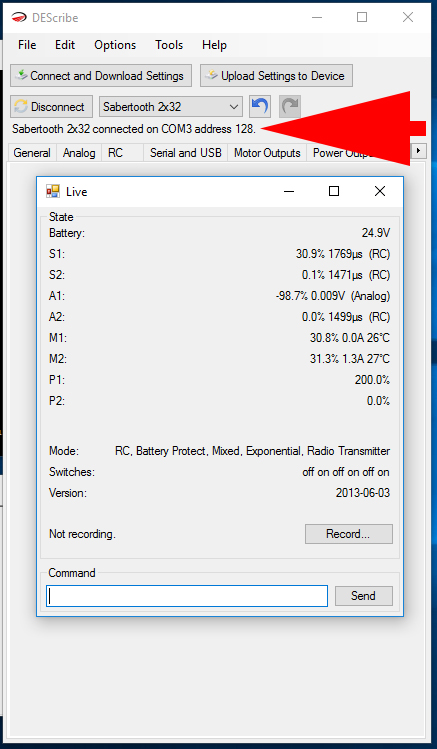
Monitoring live Sabertooth data on remote robot
Let’s wrap up this brief post on that note. Next time we’ll present a few tricks to hopefully keep your shins healthy while building these big robots. Here’s looking forward to seeing you again soon!
Sincerely,
Roby
Notes
- VirtualHere is free to connect to 1 device. For more devices, you’ll need to purchase a license.
3 Responses
I know this is a few years old, but could you give me some baby steps (ie can’t wrap my brain around it yet) to wire my RASPI to the Sabertooth with a PS2 controller. I have the receiver and controller from Lynxmotion.
Me 3
Hi John — Apologies but I haven’t any experience trying to pull that off.
Take care,
Roby