
Regular readers know that I occasionally assume the role of ‘ole Dad Roby and hand down what I believe to be hard-won wisdom. When you’re testing out your wheelchair robot — especially in the early phases before you know it like the back of your hand — you have to develop a pre-flight ritual BEFORE YOU FLIP THE “ON” SWITH for ensuring that the motors are either 1. in neutral or 2. off the ground.
Failure to heed this advise, especially in my early days as a roboticist, cost your author SIGNIFICANT AND ENTIRELY AVOIDABLE PAIN IN THE FORM OF CUT AND BRUISED SHINS!
Perhaps you’re thinking: Yeah that’s a great little tidbit of advise, but what kind of super fancy expensive specialized mount can you use for the task of holding up a big robot?

Now it’s clear: I’m just using the sturdy metal charger to hold up the robot. Hey, it’s not a perfect holder, but it’s far better than testing out a new motor driver on a grounded platform.
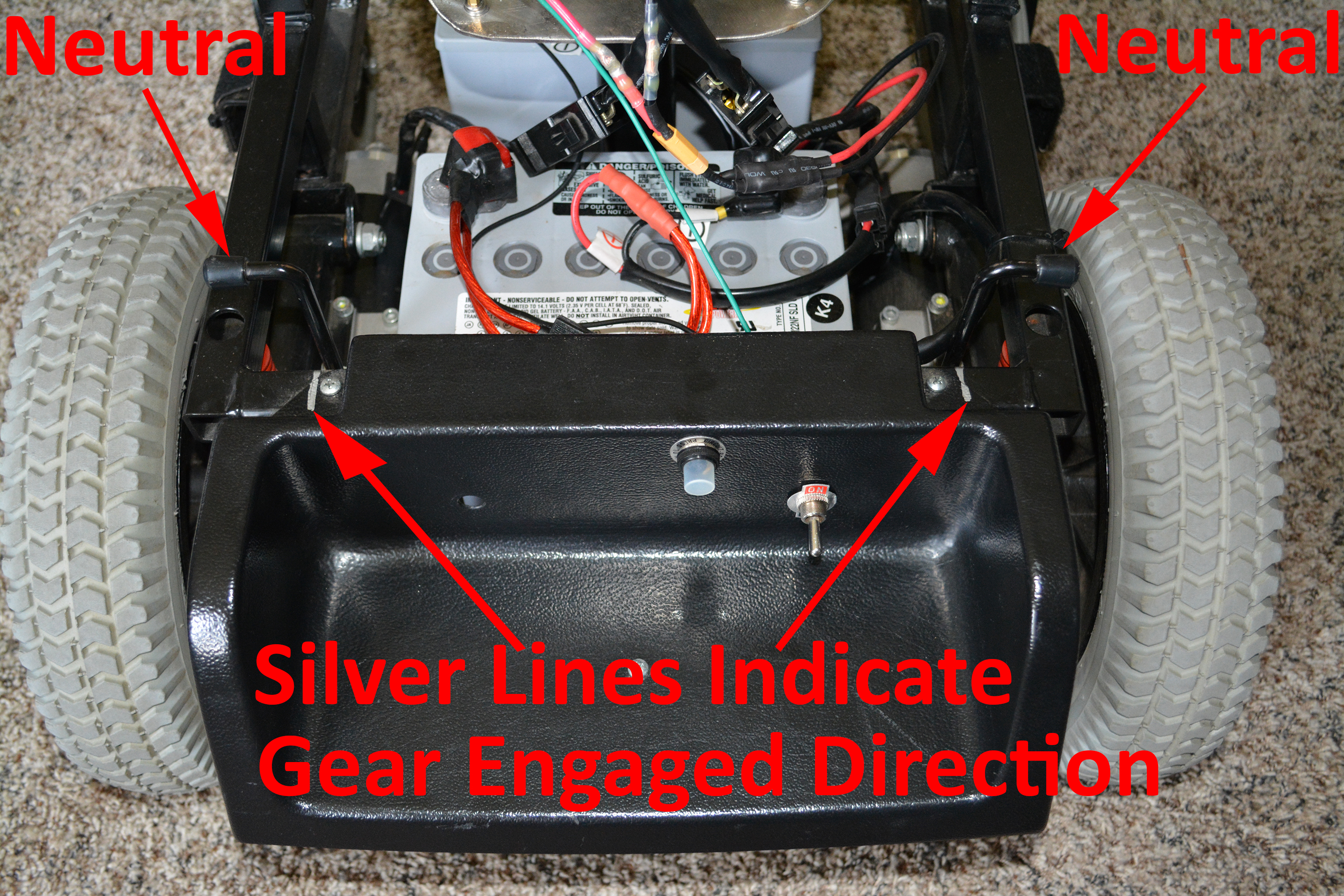
Here’s another cheap trick that makes it easy to tell if Rover 2 is in gear. Notice in the picture above that either motor is engaged by turning the metal knob to be parallel with the Rover. When the metal knob is perpendicular to the wheels, it’s in neutral. Perhaps most people naturally remember that kind of thing, but I don’t. So I like to take a silver Sharpie and draw a line indicating which way the knob will be when the gears are engaged. Now I know when I look at the robot, as long as the knobs aren’t inline with the silver line, that my shins are safe.
So I hope, dear ambitious roboticists, that you’ll heed this warning and spare your shins the pain that mine have endured. Let us close with the words of Valiant-for-Truth from Pilgrim’s Progress:
“I give my sword to the one who follows me in my pilgrimage…
My marks and scars I carry with me”
Sincerely yours,
Roby
Leave a Reply